I’ll have to double check that these are versions d and b. Done back in May 2020.



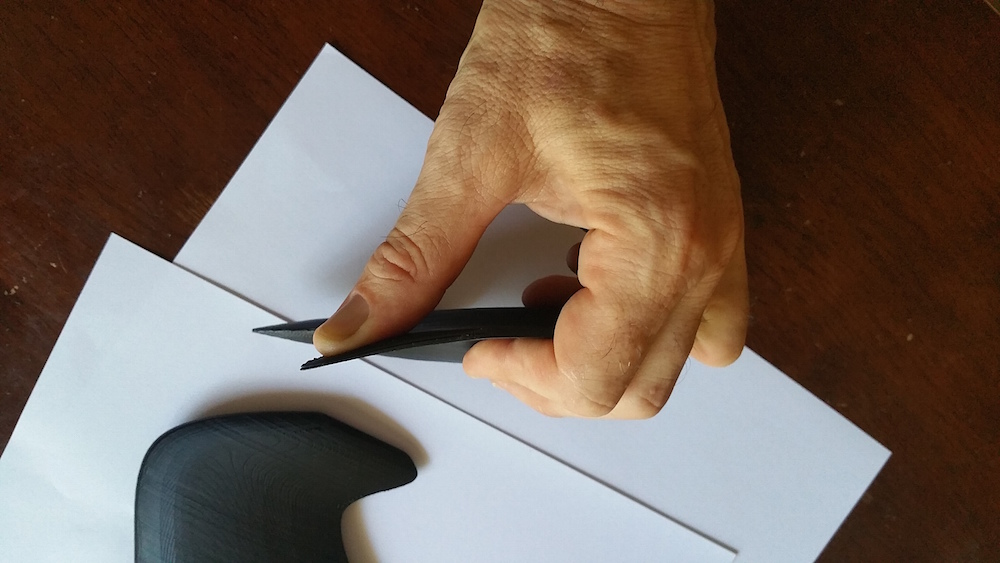
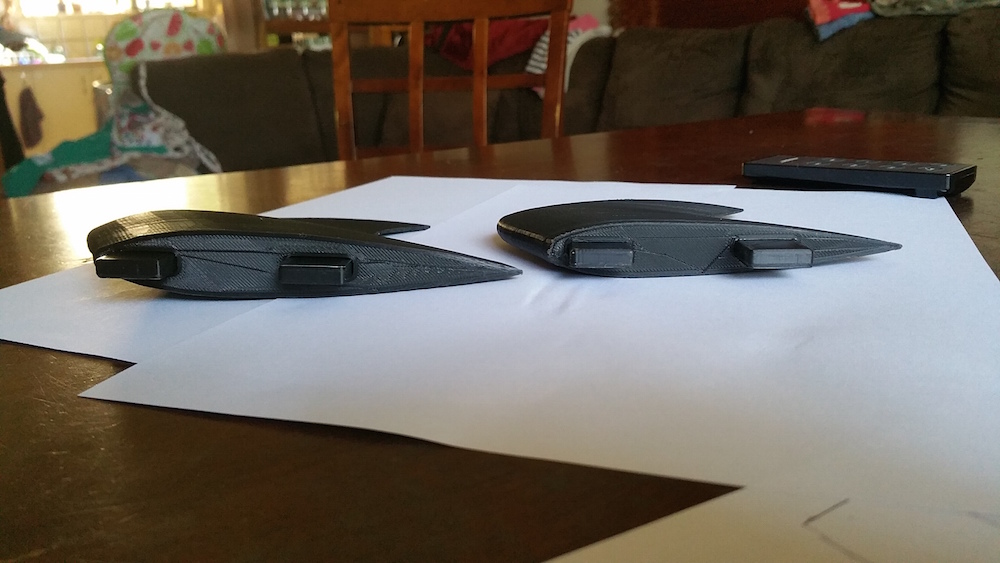
I’ll have to double check that these are versions d and b. Done back in May 2020.

We have come to a point in engineering where engineers seems to say “I am an electrical engineer” or “I am a civil engineer” or an aeronautical, mechanical, control systems, materials. I think we really need to ditch these titles if we are to move forward, for they hinder us in the creation of new designs. If you’re an engineer, then you are a university qualified engineer. You are supposedly only one year off a math major (if you wanted it) and you have all the base skill sets of physics and chemistry. You should have the base of several coding languages under your belt, for you use coding to simplify repetitive tasks. You should also be able to do the ‘do’. If you need to pick up a welder, circular saw, soldering iron jump in a dump truck or bull dozer, you should be able to get on any of those machines or pick up any of these tools and figure it out and work it. Of course a skilled trades man should be able to do a neater job on that one skill, but you should be able to figure out the tool and do a good enough job to get things running.
Having said the above and making it the norm, rather than the exception. We can now move forward. You are not limited to your facet of electrical, or aerospace or mechanical. Think laterally. Buy a text book from one of the other disciplines and add it to your skill set. That or get on the tools and build something. We are in exciting times. 3D printing is taking us places at a pace never before possible. Automation is freeing our time to think of better things. The information sharing of the net allows all sorts of applications.
It’s not just about a highly paid job in some company with a great big long title. It’s about taking ideas to the next level. You spent all those years in your degree to just come out an shuffle papers in a company? I think not! There are so many things which need developing. Automated sea going ships. cars that are actually aerodynamic, bicycles which can carry the shopping which can average 40km per hour, better blades on wind turbines, open source mobile phones. The list goes on.Of course there some people out there doing all of the above, but I think there could be a whole lot more.
When someone asks you a question of science, don’t be afraid to say “I don’t know” for It is probably one of the most powerful phrases you can have. It is the entry point into creativeness and development. Letting go of old ideas. Creating free space in your mind for the new to enter. The ability to be comfortable with emptiness and the unknown. This is the true starting point. It kills your title and allows your brain to ask itself “Why?” and then, “How could it be done?”. It allows more than just your current skill set to create the new. It removes social conditioning. The fear of looking stupid in front of the crowd when testing your new whatever.
For example. I personally design and build a lot of prototype small planes which I test gliding at the local slope soaring hill. I noticed initially that I felt stupid launching my new plane in front of so many people for the fear of ridicule and laughter. As designers we have to build a bridge past these social fears. If there is a reason underneath your test and you prove a point to yourself in front of the laughing (real or perceived) crowd then that’s all you need. I often stand out there and release the new plane into the air only for it to face plant the ground 2 seconds later. Some laugh and hurl abuse. I pick it up and launch it again and again and again. They laugh at the perceived failure, but with each short flight I learn the next stage.
Weeks or months later I am flying one of my designs in a wind so strong all flyers have stopped. No one can fly for it is too turbulent and strong. Another flyer comes to me and gives some advice on how I should alter my plane design so that it will fly better. I thank him for his advice and keep flying. His suggestion would actually not allow me to fly in these conditions. He suggested what is accepted as the social norm in flying. The reason he gave is not actually how fluid flow works, but it’s just what everyone says.
People are conditioned by the people they spend most of their time with, the media and their families. They also get trodden on by older, supposedly wiser people. Look up to no body. Listen to the best people in their field, but idolise no one. You are your own mind. Turn off your television and grab a book of science. There are so many things to grasp in science that you don’t have time to listen to your colleges, friends, the media if they are just babbling opinion.
In case you think I am biased to university graduates then think again. Some of the best creators of complex machines I know have little qualification and are dyslexic They just crack the welder out, build, learn from their mistakes and most of all are not afraid to say “I don’t know.”
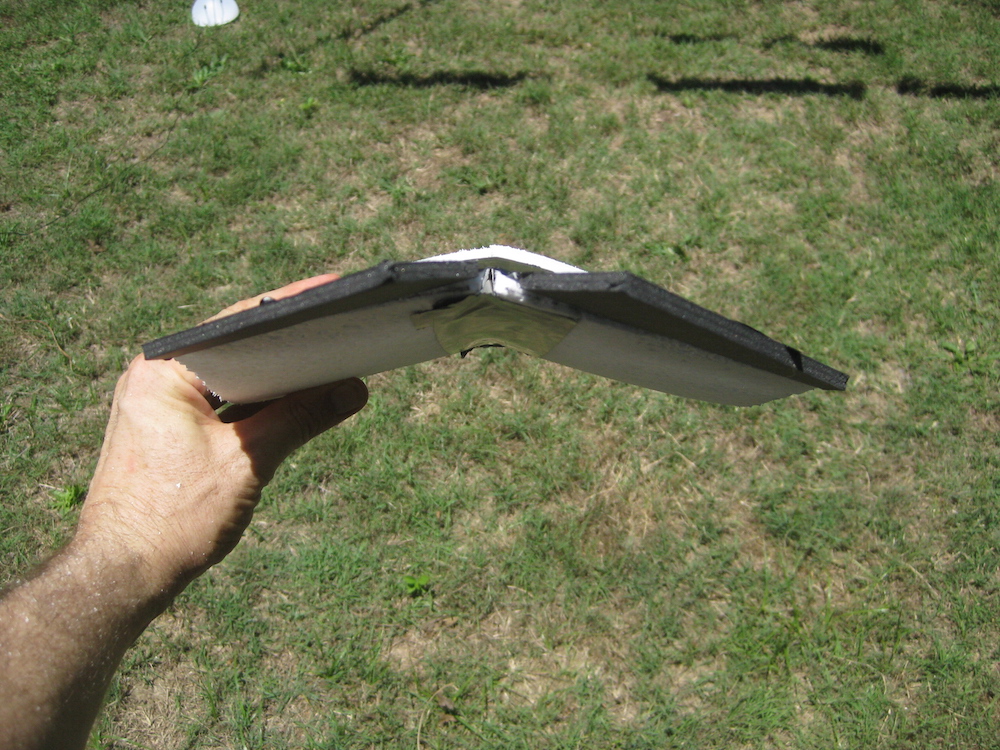
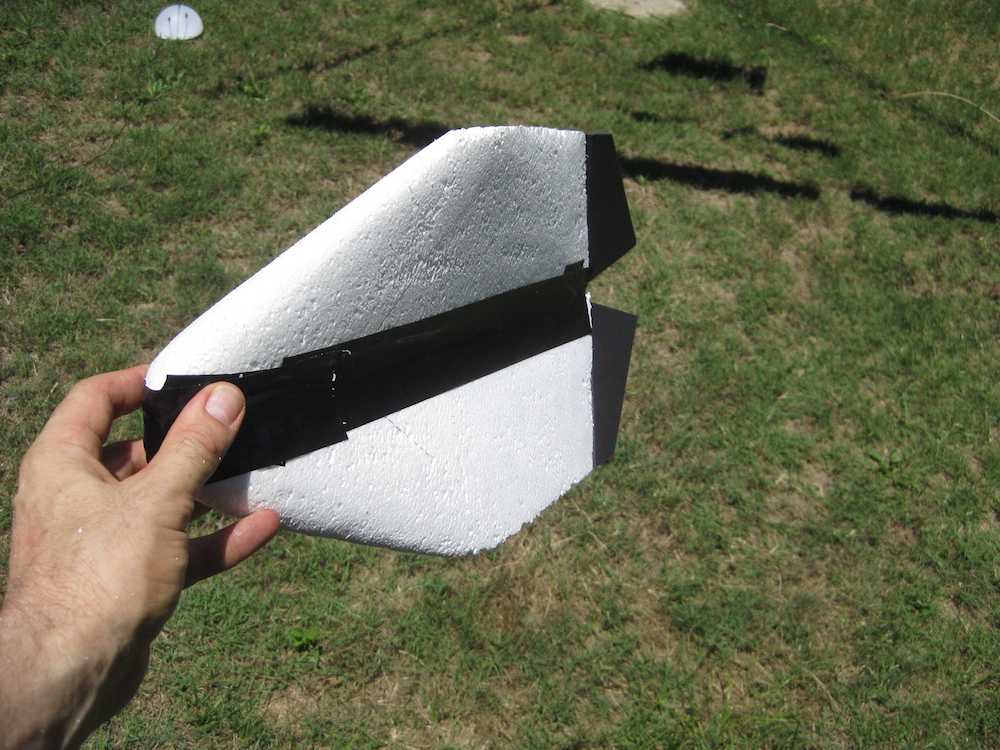
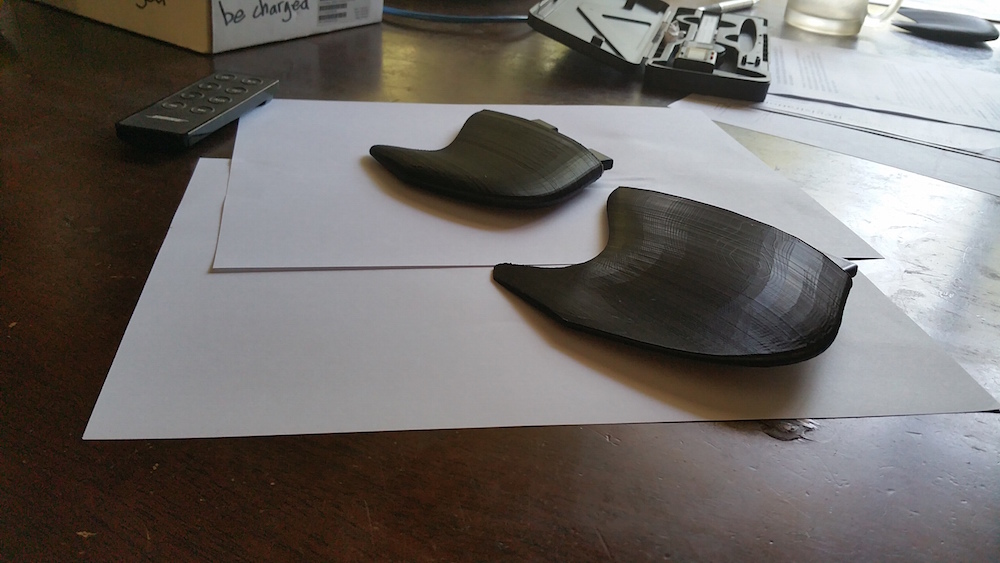
I’ve had some ideas bouncing around in my head about the combination of blended wing bodies, birds tails, anhedral and spanwise lift distribution. These are some attempts at finding a balance between all of the above.
I’ve been watching various different sorts of birds tails recently and realised several similarities. Also thinking about the F-111 down at the Evans head museum. The people down there were pointing out that the British had made the entire tail plane change AOA thus making sonic possible. ‘Twas just unfortunate that the Americans used it first. Still it was a British realisation.