I am trying to make a head tracker for the FPV setup on our slope soaring gliders, as we need to be able to look around to find the cliff edge when gliding. If you’re more than about 30m out, you can be falling out of the sky. With a camera just facing forward, there is no way of telling where you are in the sky relative to the cliff edge and thus the air currents.
From the RCgroups forum post link:
Head Tracker forum post
This link points out that the GY-85 which I ordered from DX.com based on Dennis’ initial forum post is not the same as it was some 6 years later. The GY-85 I bought does not have the same magnetometer chip on it. So the headtracker code from this forum does not work on the yaw axis.
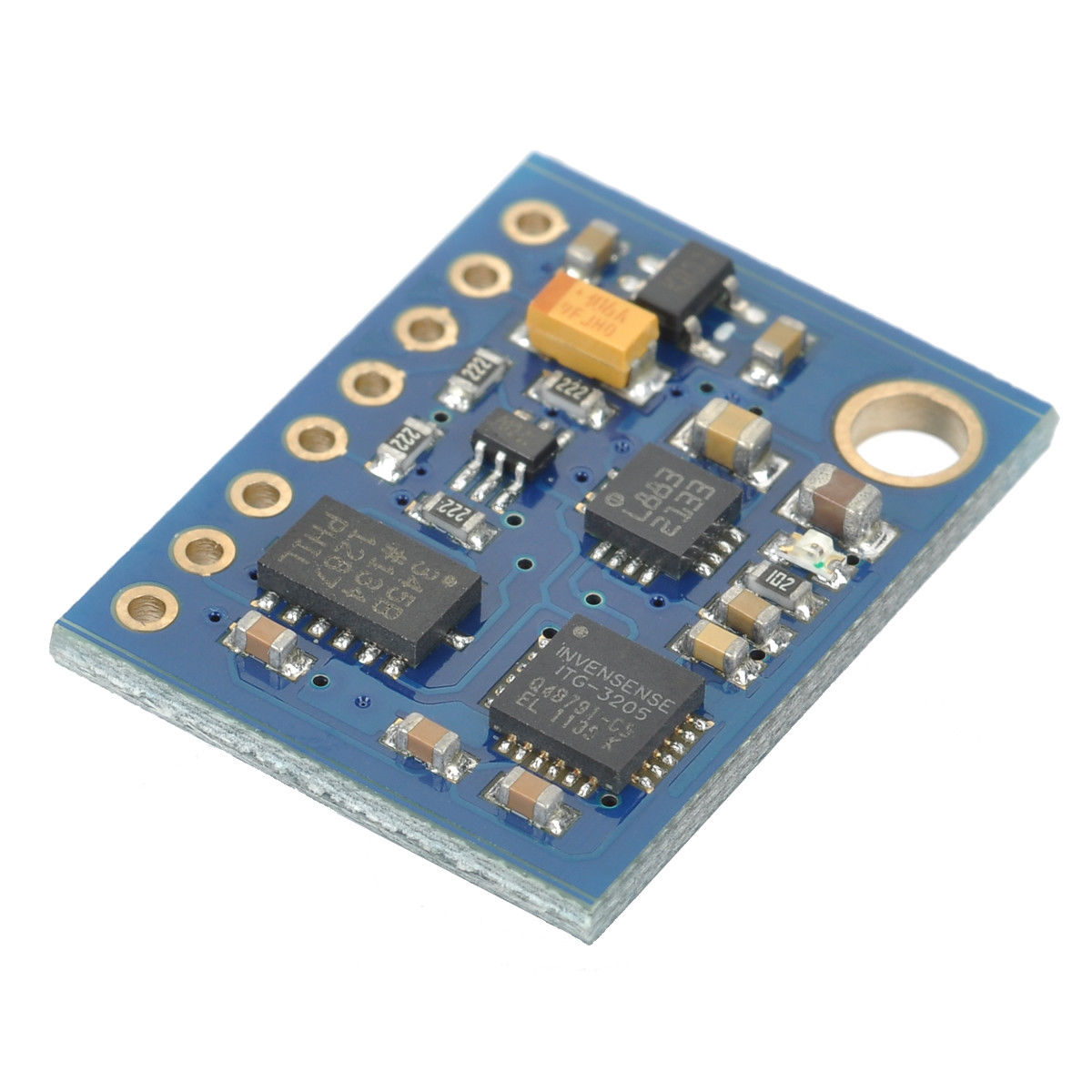
The PCB I bought has the QMC5883L chip set instead of the HMC5883L chip set by Honeywell.
I dug up the data sheet and some code for the QMC and the code seems to work well enough in all axis’ . It doesn’t seem to isolate any particular axis fully, but I’m sure with some filtering I could make it more accurate. However it was getting on midnight so I stopped playing with the board and software and decideed to focus on what I was doing.
The i2C bus address was obviously incorrect in Dennis’ code for the QMC chip set. –> Fixed that.. good.
But the QMC works slightly differently and has a different library to the original head tracker code. For the sake of $AUD15- and the fact I could get an IMU board out of Melbourne, I took the time efficient path and ordered the GY-85 board with the HMC chip set below. You can see the
L883
2133
Markings of the HMC5883L chip in the image below.

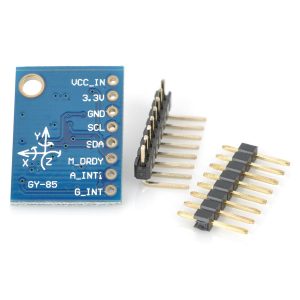
I ended up ordering this GY-85 from ebay and the images show the Honeywell chip comes with it. Fingers crossed it’s the correct one.
More on this later. Soon we’ll be slope soaring FPV with a head tracker.