2 axis inline (possibly) aerodynamic head tracker gimbal
Currently working on making this 2 axis head tracker gimbal. Roll is not necessary. It it optimised for FPV slope soaring (gliding). We want it to ultimately sit under an aerodynamic cowl so most of the bumpy edges are not in the air stream. Also both rotation points have their own bolts so that load on landings are not transferred through the servo mechanics as much. This design is for the Runcam Eagle Pro 2.
It’s designed for standard Corona 939MG servos, simple linkage stoppers and galvanised 1.8mm – 2mm fencing wire for pushrods.
FPV head tracking slope soaring
Redious Maiden – Quick one day scratch build and fly.
Redious is an attempt to make a plane for beginner flyers. The air frame was shaped in just under 3 hours. Attaching the control surfaces and electronics was about another 3 hours. I started in the morning and was flying by the afternoon. We had discovered that 50mm thick EPS foam is incredibly strong without any laminates.
The main wing is just a single rectangular piece and the fuselage are just 2 more pieces of 50mm EPS. The control surfaces are 5mm thick triple ply foam board. The whole thing is shaped with a surfoam and sandpaper.
If you do happen to snap the wing in half it is easy and cheap to repair. You can just do a “rough as guts” finish and it will still fly. So no stressing about denting that perfect leading edge you spent hours refining. Of course you could spent another 3 days sanding and finishing to make it perfect and it will fly better. Personally I like to ask if that adds any more fun to flying. Sometimes it does, most of the time not though.
Music –> Flume – This song is not about a girl.
Flying starter setup
Building on the Redious design above and getting into flying wth a low overhead, the best starter kit I can find at the moment is:
Gliders
This list is optimised from buying in Australia.
- Transmitter and receiver kit (TX/RX) – Turnigy i6 (which is a rebadged Flysky i6)
- 4 * AA batteries for your Transmitter (TX)
- A 4.8v power pack
- An EPS foam sheet 2400 * 1200 * 50mm. Available from Ballina Fibreglass here in Ballina. You’ll have to look up foam suppliers where ever you are. In cities you’ll get sheet cut to thickness. They usually get their foam in bulk from CSR or DUNLOP (I think).
- Foam board from most Signage supply places. Usually comes in a 2400 * 1200 * 5mm sheet
- Gaffer tape
- Hot melt glue gun – This is a golden piece of equipment.
- Multihesive(preference) or PVA glue
- 1.8mm galvanised fencing wire
- Linkage stoppers. These are by far the easiest to use of the many I’ve tried.
- Control horns. These are by far the easiest to use of the many I’ve tried.
- Locktite
- 2 x servos DS-939MG
- Surform for mowing out the foam
Base extras
Notes:
The foam sheet above will probably make 3-4 planes. So you have spare for WHEN you crash it. Yes you can get in the air more cheaply initially, but when you kill your wing it will be harder and more expensive to repair. These planes will be less breakable. Also they’re a bit bigger so they’re less twitchy and you are less worried about weight.
Try find the parts that are in the Australian warehouse so you’re not waiting 2months for things.
For methods on building and repairs see the Gemot manual. It’s a more advanced plane, but the techniques you need (except for surforming) are in there.
Also foam board flat pack planes from flitetest are easy, but will take 3months to get to Australia via standard postage.
Dubious GY-85 boards and HMC5883L fix
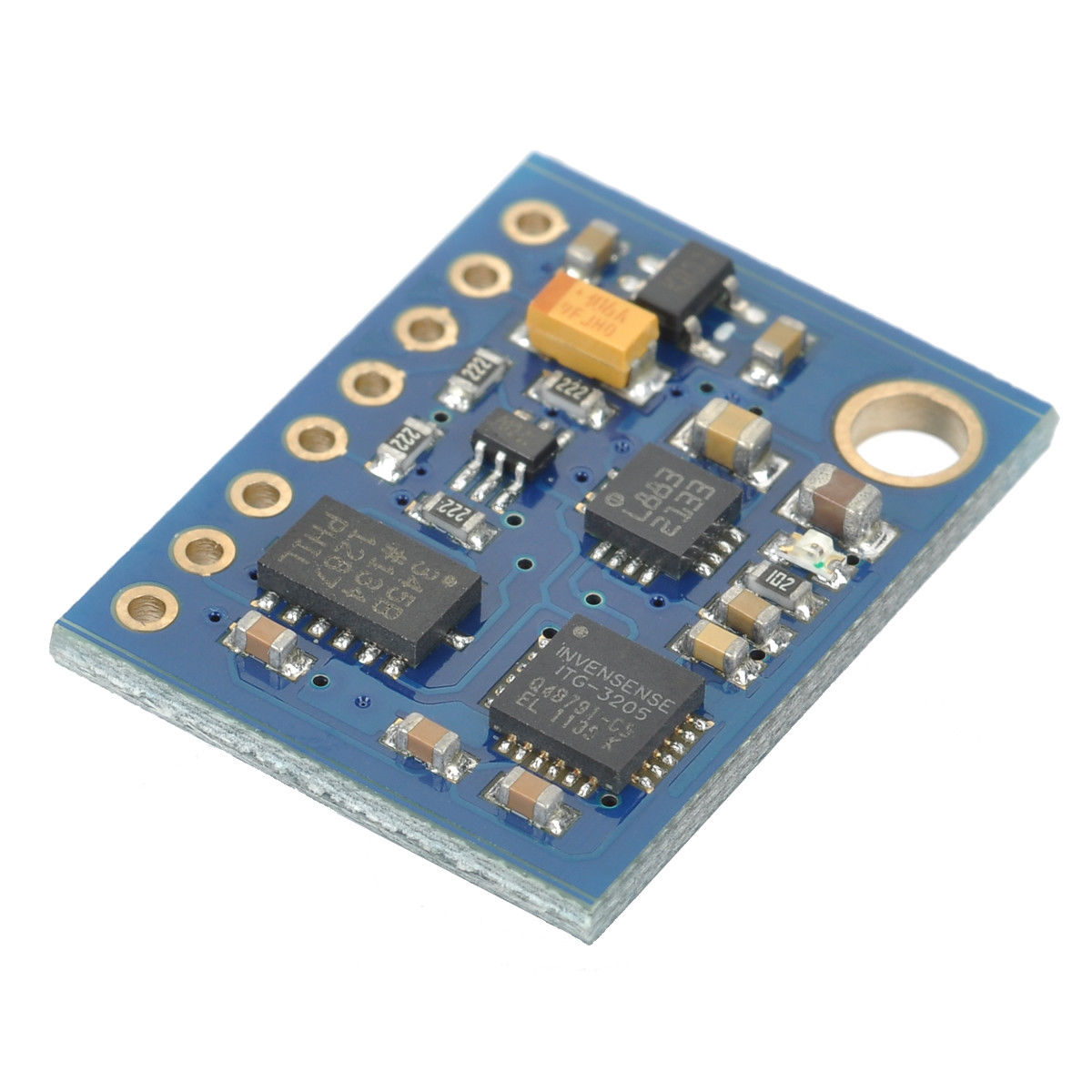

I ordered 3 different GY-85 boards from 3 different suppliers to find that all of them had the wrong magnetometer in them. Some even advertised their product with the HMC5883L chipset on them, but when they arrived they where the QMC5883L chipset.
After all this effort to find something without the shipping cost / time from the USA I decided to just get the HMC5883L individually and attach it to the I2C bus of the GY-85 board. The individual boards is called the GY-271. I found this supplier in Chullora in Sydney:
GY-271 HMC5883L
It worked just fine and now the head tracker is working.
You’ll see in the image below that the Honeywell HMC5883L chip is defined with the markings
L883
2133
Where as the 6th page of the QMC 5883L manual shows the markings something like
DX
5883
XXXX
Using the GY-271 compass board by itself
(Also posted in RC groups)
Long range flying and what this dB stuff means.
The first thing to do is watch Kahn Academies video on calculating decibels
The video also points out how sensitive the human ear is.
P = power in Watts (W) = Work / time
Work is an energy measurement. What is energy? That’s a question which will stump pretty much everyone. The answer is probably another question. Why? Don’t hurt your brain with this one too much…. moving on.
J = Joules = an energy measurement.
Work(J) = Force * Distance
Force = measured in Newtons (N)
1N = about 102grams * gravity
The actual formula being
F = m * a
Force = mass * acceleration
So 1 Newton of force is about half the mass of your house / car keys just sitting in your hand.
Lift your car keys 1 metre in one second. That is 1 Watt of energy.
You car keys have a footprint that fills the palm of your hand. You can feel it.
Spread that weight over 3 times the size of Germany, or for the Aussies reading this, a bit less than the size of the Northern Territory. You couldn’t feel that with your hand, but your ears could hear it.
OK, It have to come back to this article to explain how it relates to long range flying.
Urban Aeronautics
A very interesting video from the Vertical Flight Society.
So I was initially thinking about 2 rotors like this for Sentach except running port / starboard rather than fore and aft. The thing is that the application is different. I’d like to take Sentach out to 300ish knots for small payloads and get 1000km range. Smaller payloads require a smaller vehicle. Thus we can stay with the wing model and use VTOL not for hovering so much as just punching off the ground and not needing a runway.
Roughing out a feasible delivery drone.
The above pdf is a very rough estimation of a delivery drone capable of an 8km return flight (16km one way) with a 4kg payload.
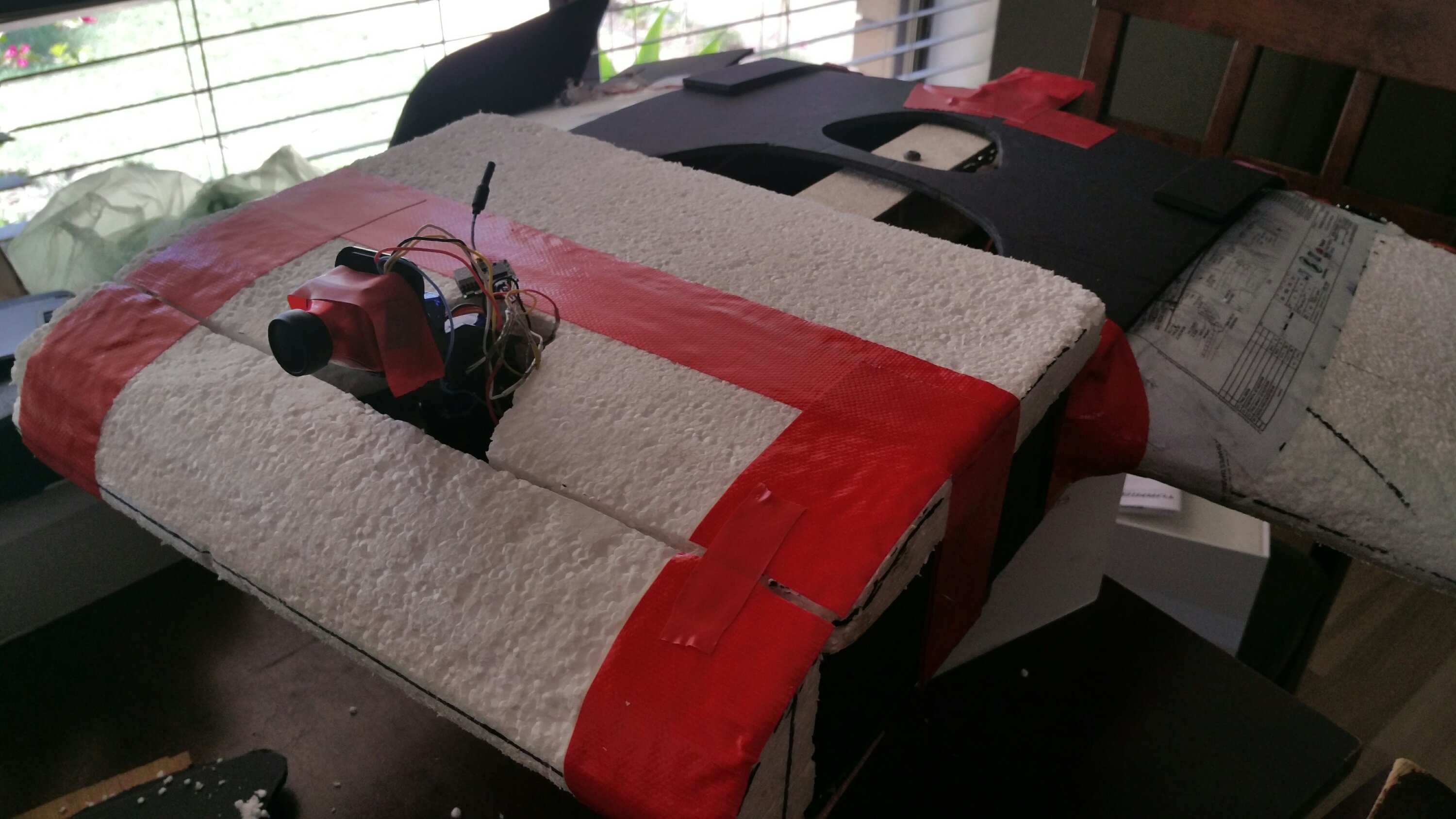
Slope test – Sentach
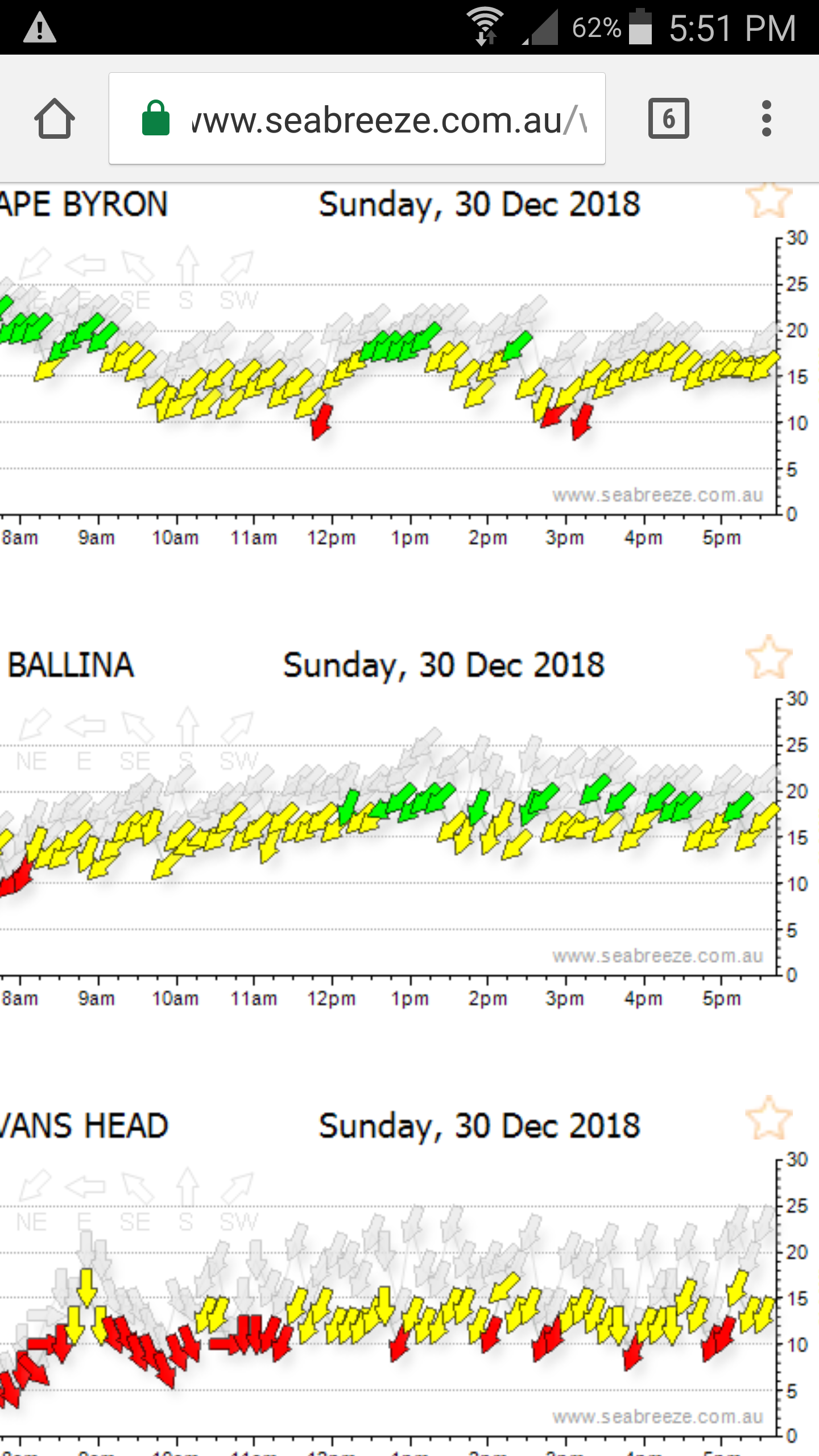
Took the headtracker out as I wasn’t expecting much lift today. At best 25kts (12.8m/s) at Pat Moreton. Flew perfectly, but the glide slope was not enough to keep altitude. 763g. Still waiting on props to arrive. ‘Tas heaps of drag points which could be eliminated. Could make a larger wingspan for these wind speeds.
Would be interesting to see what CFD says and how it compares to reality.
Installing the head tracker gimble