Will have to check this out soon.
Thanks for the link Sherv.
Will have to check this out soon.
Thanks for the link Sherv.
Would like to get flight stabilization happening so it’s easier to fly FPV with the head tracker initially. At least if I balls it up I can throttle off, let go of the sticks and it will have some chance of landing flat. Would also be able to see compass headings, altitude and battery on screen through the OSD.
Think I’ll start here first and see if it works with that F3 board.
Some others to look at:
http://www.librepilot.org/site/index.html
Ardupilot
Betaflight
MWPTools for navigation to mix with the flight controller. That or the INAV software.
Nice work Tom.
Thanks for the link Sherv.



Put the motor in and re-balanced it. Flew at around 14:00ish under power with about a 30kt NNE (15.43m/s) for backup glideability. Flew so well. Only hit about half throttle with a 4s. Had heaps of lift, so I’d say I could max out at about 1kg payload with more throttle. Now onto a flight controller before sticking the head tracker in.
Flight weight – 1414g
New COG – 280mm from the L.E.

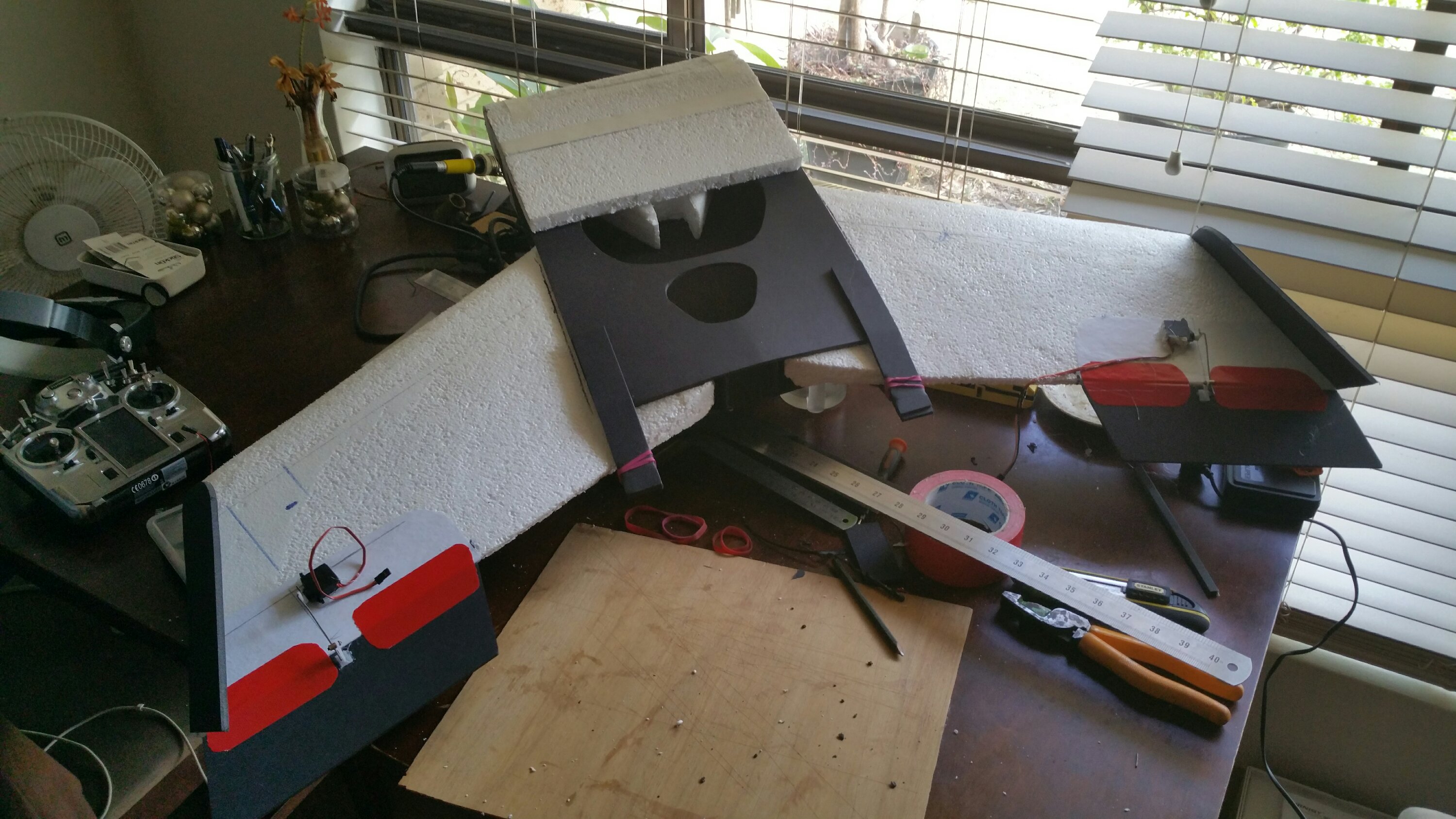
The Sentach glider worked well today at the Pat Moreton park in about 15-20kts NNE. Videos to be posted shortly.
Flight weight 680g.
COG 310mm from the L.E.
Beautifully smooth flat landings. Some wobbles as expected. The’s alot of drag points. Especially with the flat sides of the nose. Don’t think anhedral would totally fix it because of the nose as it’s obvioualy turbulating when a crosswind happens.
Crashes it once and the wing popped off nicely dispursing the impact force. Plugged it back together and went again.
The angled wingtips wouldn’t stop the tip vortex as XFLR5 shows in the sim.s. would be better to round into them like Gemot. The difference they made to Gemot was nothing short of impressive. Holding Gemots wing in one hand whilst spinning around, with and without wingtips gives a tactile feeling of the drag differnce involved.
More to come soon.
An EAP is a manufactured muscle fibre. If anyone knows where to buy, or how to make them., please contact me.
Preferably with contraction times measured in milliseconds.
I found some info here:
https://ndeaa.jpl.nasa.gov/nasa-nde/lommas/eap/EAP-material-n-products.htm
https://ndeaa.jpl.nasa.gov/nasa-nde/lommas/eap/EAP-web.htm
https://ndeaa.jpl.nasa.gov/nasa-nde/lommas/eap/IPMC_PrepProcedure.htm
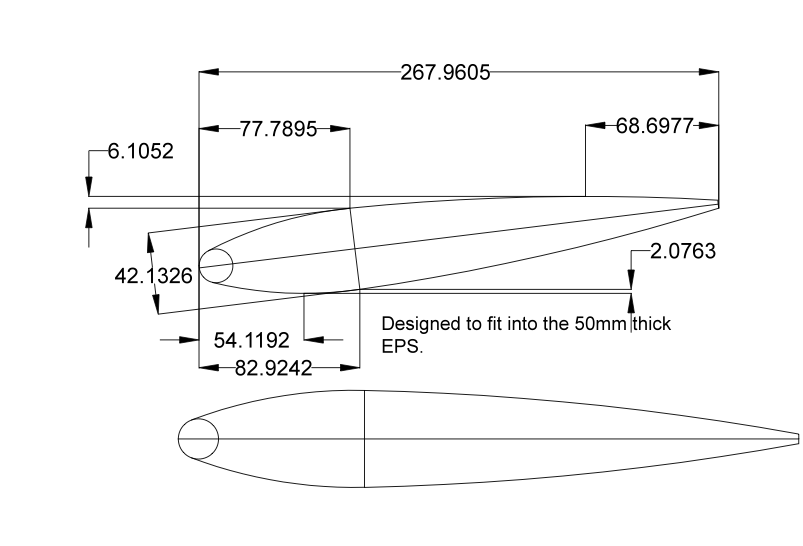
Being a bit too fried to do a proper stability analysis for Sentach, but having enough mind to sketch out the dimensions for the tip twist foil, the above shape emerged.
Designed to fit into the 50mm thick EPS sheet at 7degrees. It should kill the lift and thus tip vortex nicely. Same as Gemot, however Gemot is 7degrees and a far slower and more tolerant foil.
After watching all of the tutorial videos on XFLR5 yesterday I might do a stabilty analysis first…. Hmm maybe…. I also just want to test the head tracker and Sentach is a rough wing, not a refined design.
Electro Active Polymers. Where are they?
I seem to continuously be looking for linear actuator which are small, light, fast and not a bastardisation of a rotational or solenoid device. The synthetic muscle so to speak. I saw one on the television show ‘Beyond 2000’ about 20 years ago and remember thinking “right, a revoltion of mechanics is here”.
Obviously not.
I found a thesis of something at Woolongong Uni a couple of years ago and have not followed it up yet.
Either way, if someone knows where I can get EAPS which I can chain in series or parallel with the reaction time of a standard RC servo, please contact me (Dion) via SMS on +61 419 486 672.
This video explains how XFLR5 approximates viscosity using the polar outputs from 2D analysis.
Techwinder says on the above video that it does not do the full complex analysis for viscosity. However at this point it looks like it does a pretty good job. I was satisfied yesterday with the outputs I made. Especially considering I’d not read the manual and was just fumbling around. It did a great job of confirming my approximate estimations for Sentach. Looking at the video manual and other text today, it looks like it could do more than accurate enough estimations for my current projects.
As Techwinder states in the forums, it’s not made to just bring in solid geometry from another package and do CFD on it. However it’s focus is foils and it seems to be very fast at assembling foils and doing to calcs. A massive step up from roughing the calcs out by hand. It should be far faster to design future RC wings like Gemot. Gemot was an estimation based on what I new from hands on experience windsurfing and surfing. I actually didn’t really expect it to fly as well as it did on that first proto which crashed into my van.
Although it took several CNC models before I hit Gemot V3. There was only 2D analysis of the 2 Gemot foils using the Dresler software, where I just looked for the best lift : drag ratio for a specific AOA. That became the tip twist for Gemot. It’s still not perfect, but with XFLR5 I may be able to do more accurate mental prototyping with the software.
Still, I wonder if the Autodesk CFD design handles importing the current .stl files for Gemot V3.
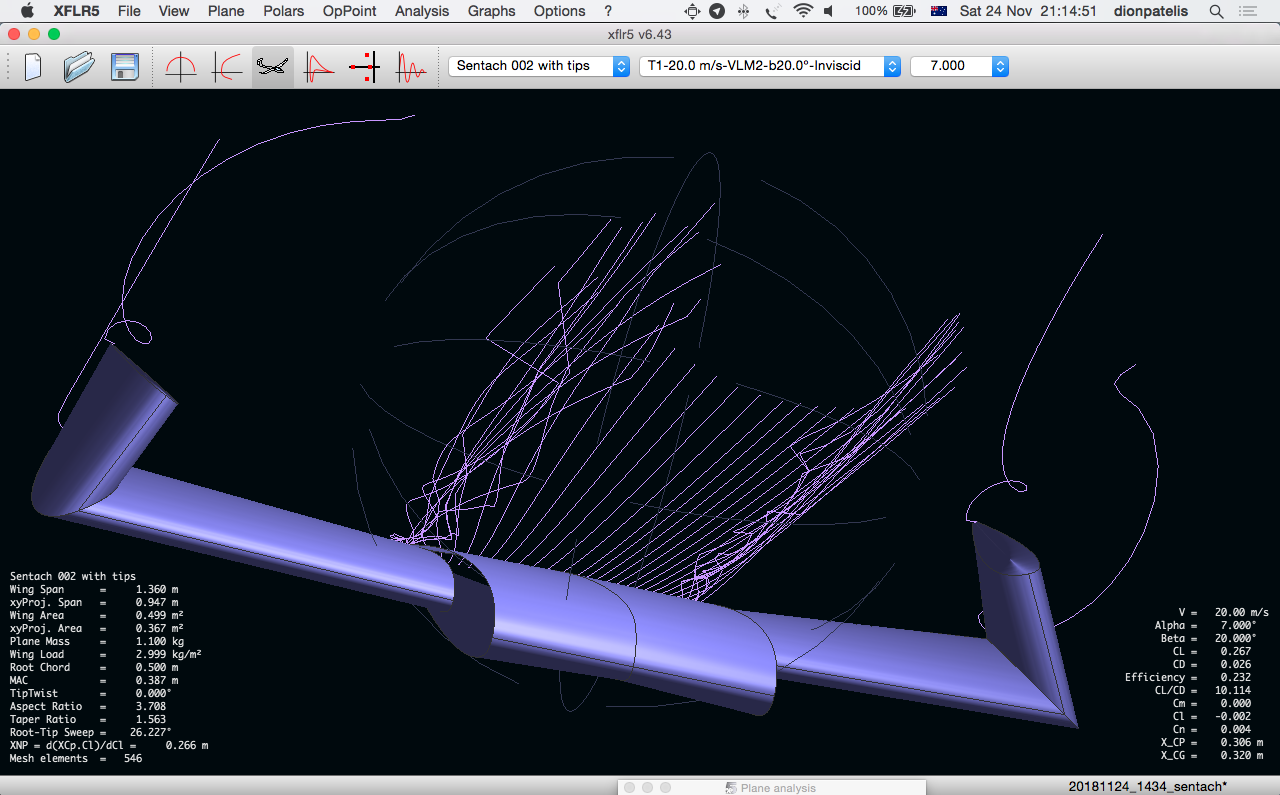
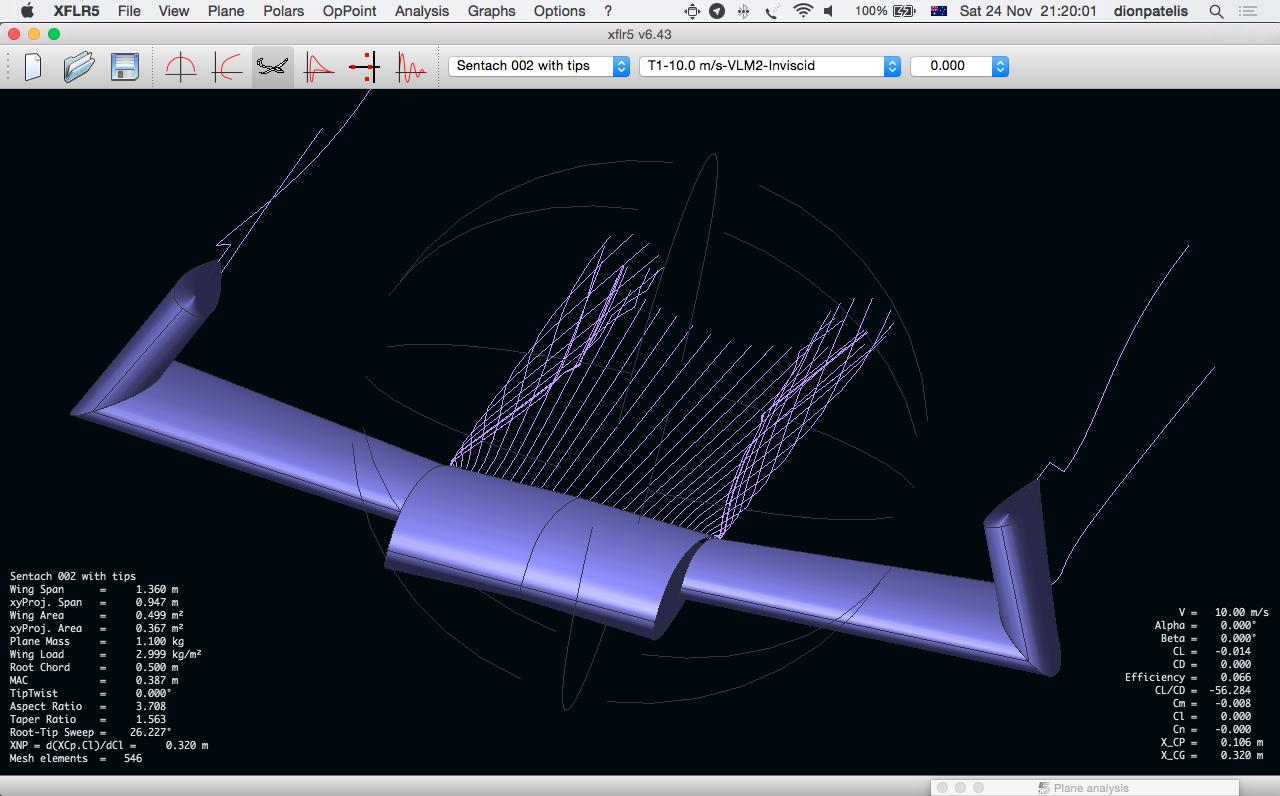
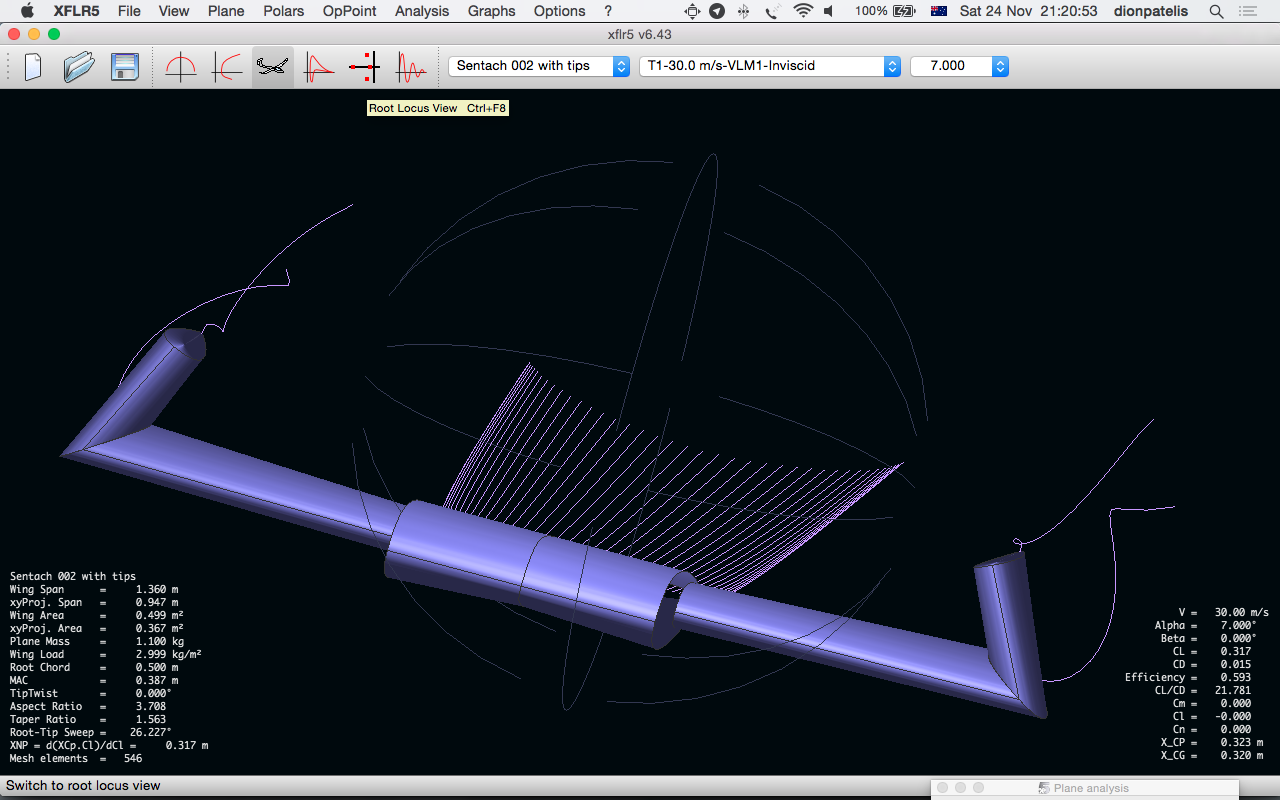
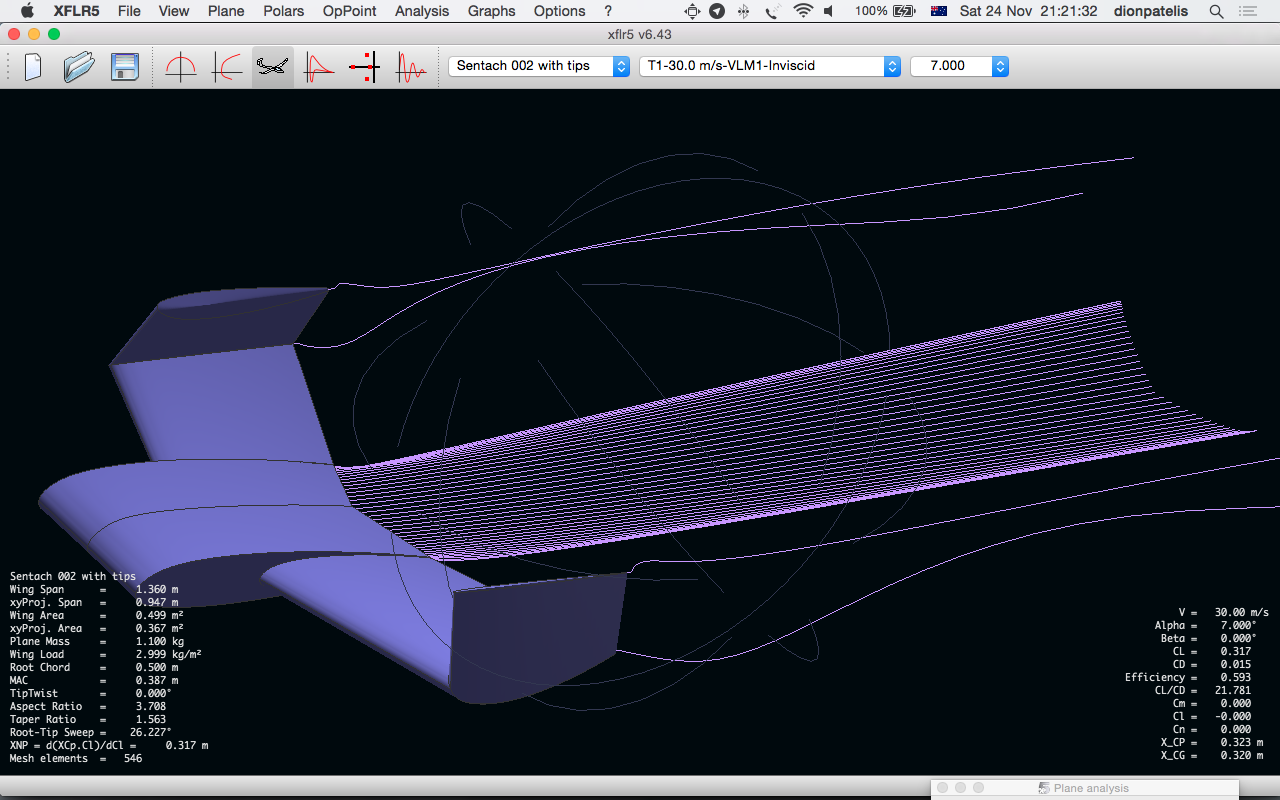
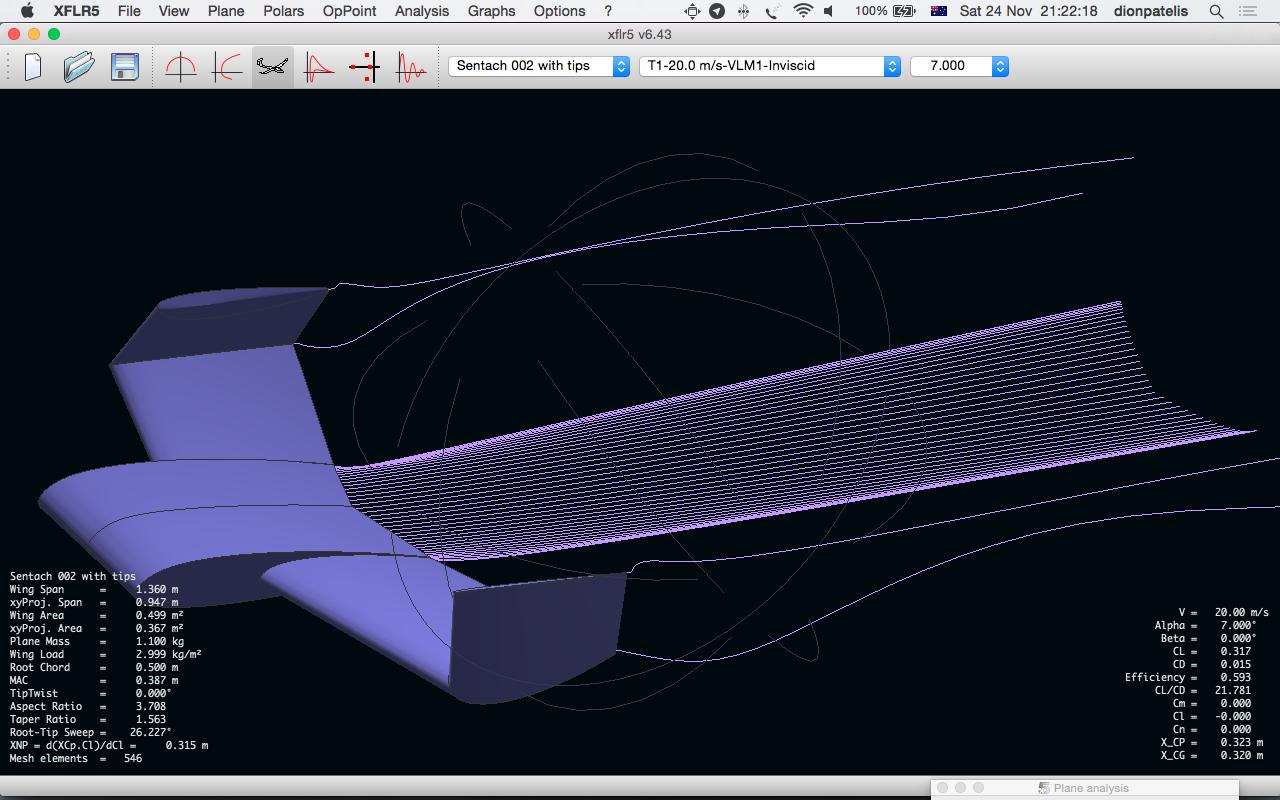
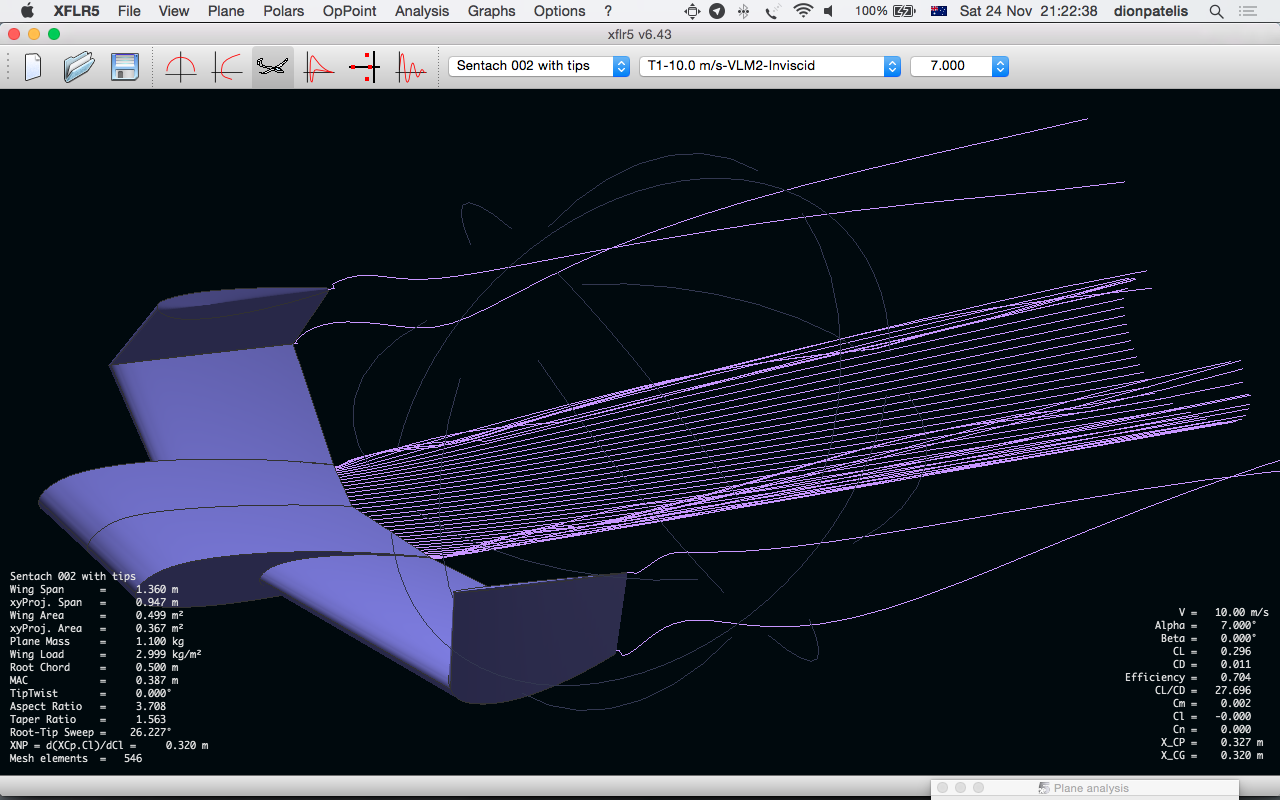
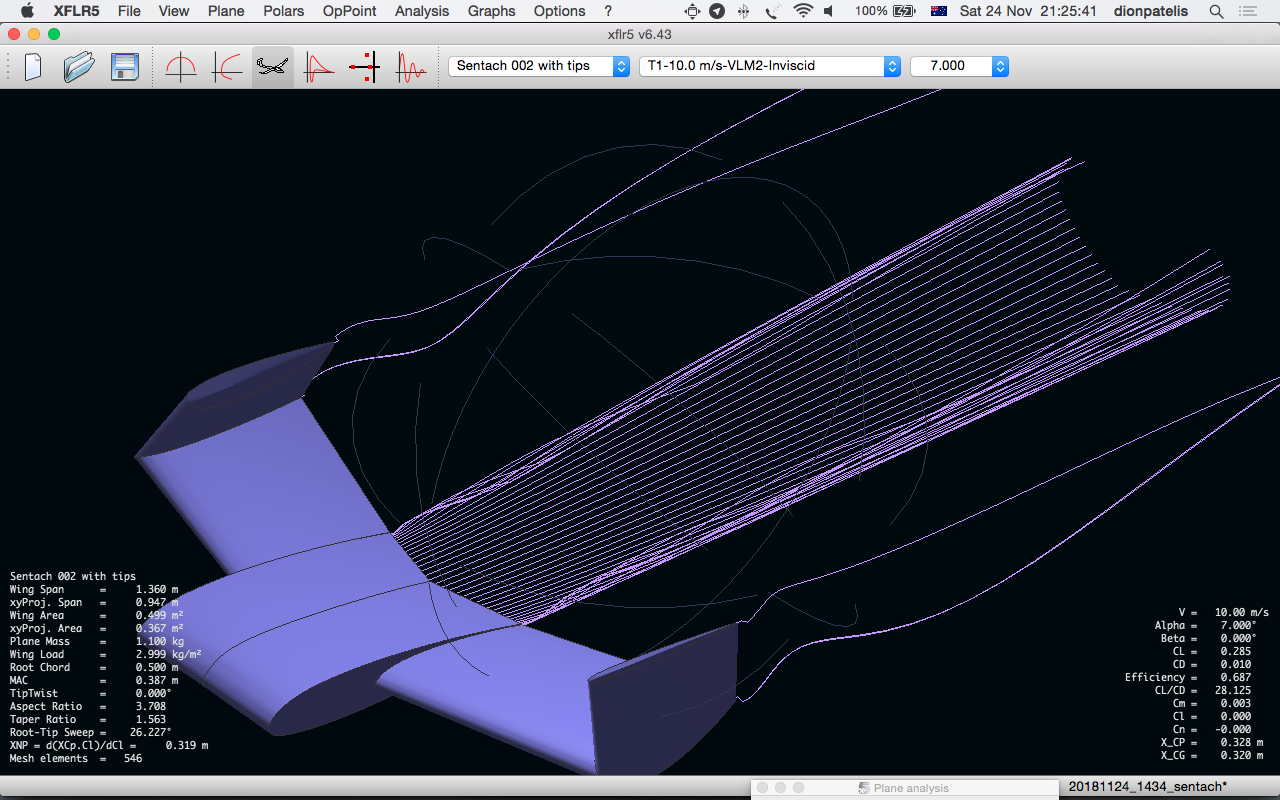
Playing around with XFLR5 I had a good time with inviscid flows, but no such luck with viscous flows. Either way it helps with visualising flows. I don’t know if the vorticies around the fuselage you see in the following images are that true to form at 10m/s. At 20 m/s (40kts) it’s probably more real. Then again we can’t expect too much from 90 degree corners anywhere around the front of an airfoil.
All in all I think 7 degrees for the wingtips will be fine. After all this is meant to be a rough wing just to carry some extra weight for the FPV head tracker.
Interestingly it seemed to say the centre of lift was around 330mm back. We’ll see how that goes.