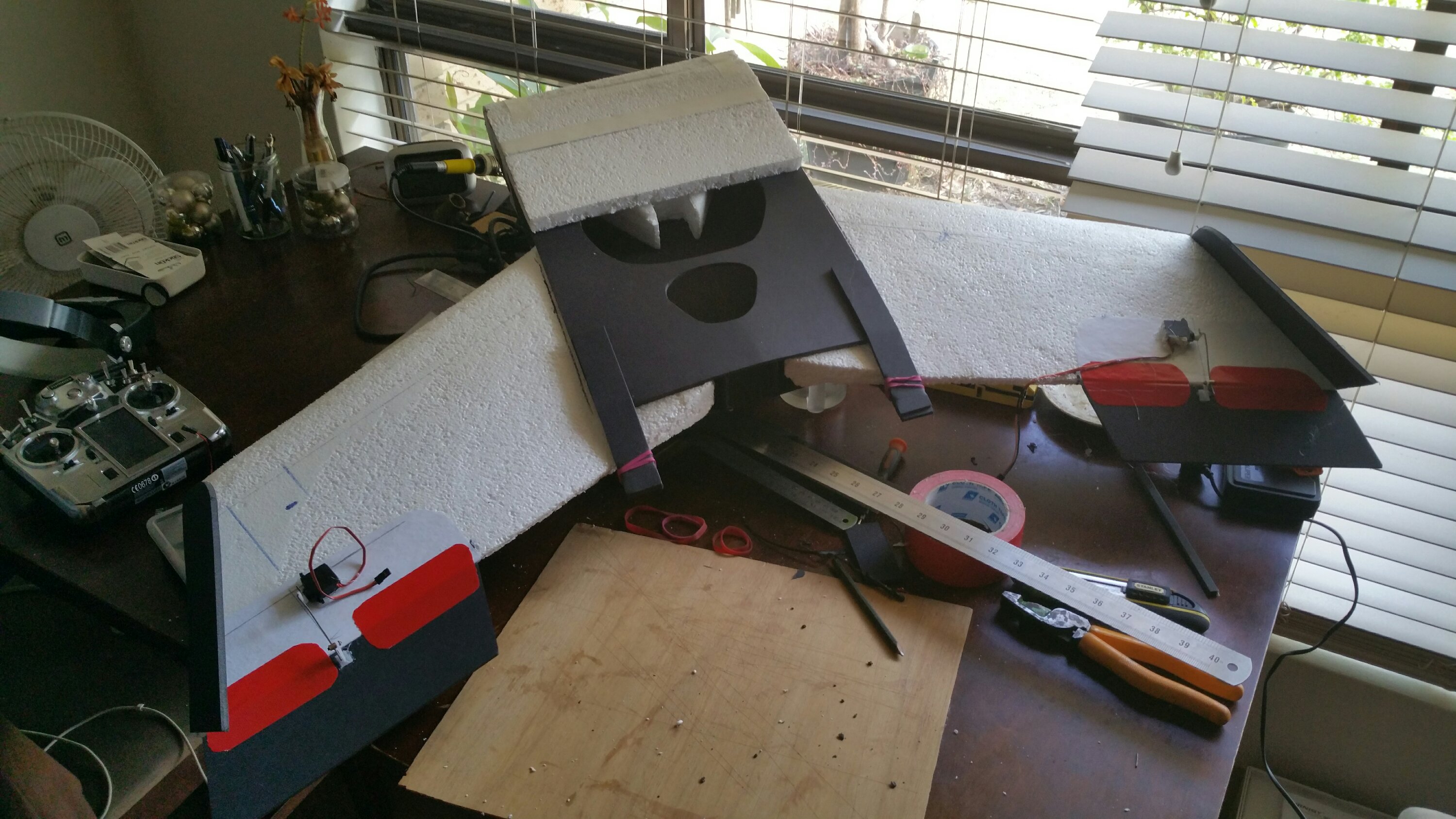
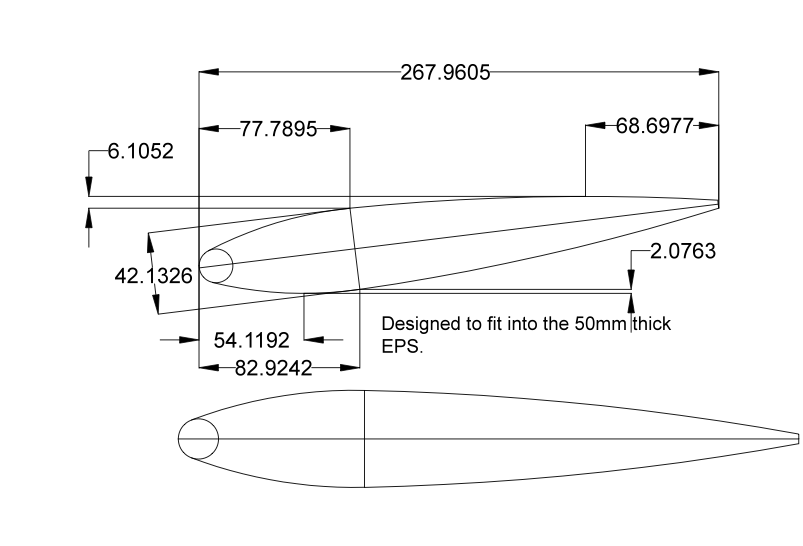
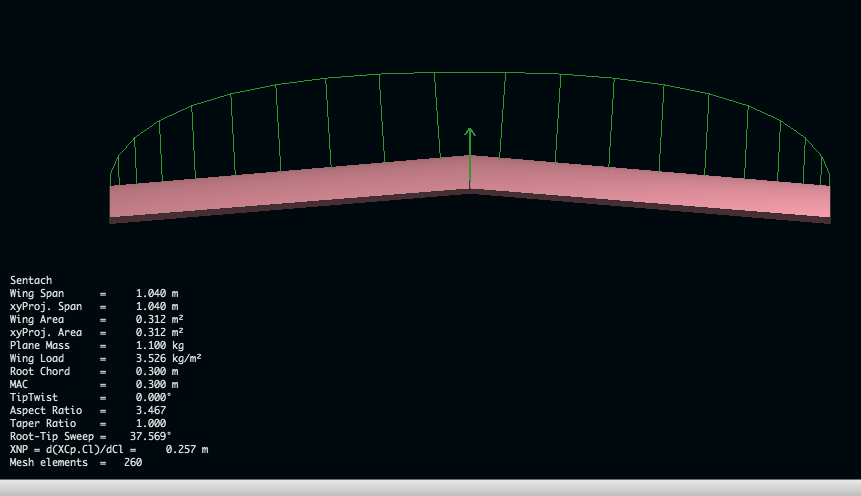
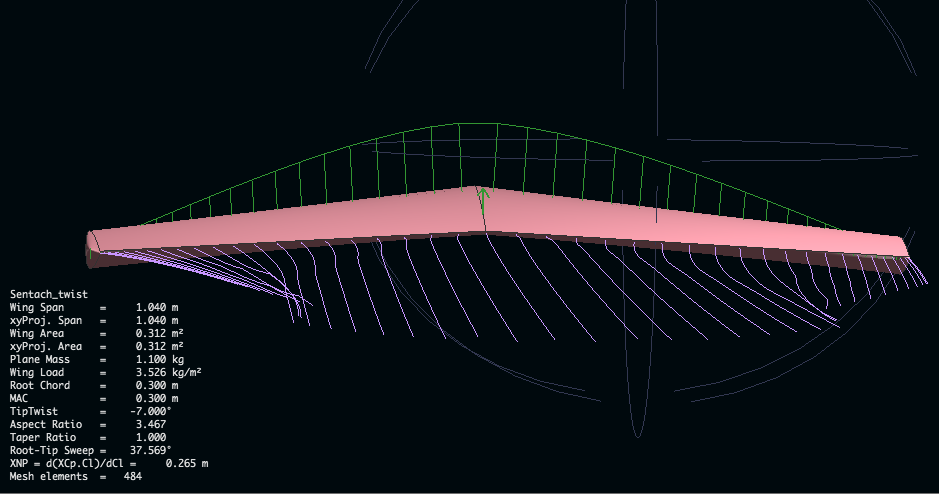
Redious is an attempt to make a plane for beginner flyers. The air frame was shaped in just under 3 hours. Attaching the control surfaces and electronics was about another 3 hours. I started in the morning and was flying by the afternoon. We had discovered that 50mm thick EPS foam is incredibly strong without any laminates.
The main wing is just a single rectangular piece and the fuselage are just 2 more pieces of 50mm EPS. The control surfaces are 5mm thick triple ply foam board. The whole thing is shaped with a surfoam and sandpaper.
If you do happen to snap the wing in half it is easy and cheap to repair. You can just do a “rough as guts” finish and it will still fly. So no stressing about denting that perfect leading edge you spent hours refining. Of course you could spent another 3 days sanding and finishing to make it perfect and it will fly better. Personally I like to ask if that adds any more fun to flying. Sometimes it does, most of the time not though.
Music –> Flume – This song is not about a girl.
Flying starter setup
Building on the Redious design above and getting into flying wth a low overhead, the best starter kit I can find at the moment is:
Gliders
This list is optimised from buying in Australia.
- Transmitter and receiver kit (TX/RX) – Turnigy i6 (which is a rebadged Flysky i6)
- 4 * AA batteries for your Transmitter (TX)
- A 4.8v power pack
- An EPS foam sheet 2400 * 1200 * 50mm. Available from Ballina Fibreglass here in Ballina. You’ll have to look up foam suppliers where ever you are. In cities you’ll get sheet cut to thickness. They usually get their foam in bulk from CSR or DUNLOP (I think).
- Foam board from most Signage supply places. Usually comes in a 2400 * 1200 * 5mm sheet
- Gaffer tape
- Hot melt glue gun – This is a golden piece of equipment.
- Multihesive(preference) or PVA glue
- 1.8mm galvanised fencing wire
- Linkage stoppers. These are by far the easiest to use of the many I’ve tried.
- Control horns. These are by far the easiest to use of the many I’ve tried.
- Locktite
- 2 x servos DS-939MG
- Surform for mowing out the foam
Base extras
Notes:
The foam sheet above will probably make 3-4 planes. So you have spare for WHEN you crash it. Yes you can get in the air more cheaply initially, but when you kill your wing it will be harder and more expensive to repair. These planes will be less breakable. Also they’re a bit bigger so they’re less twitchy and you are less worried about weight.
Try find the parts that are in the Australian warehouse so you’re not waiting 2months for things.
For methods on building and repairs see the Gemot manual. It’s a more advanced plane, but the techniques you need (except for surforming) are in there.
Also foam board flat pack planes from flitetest are easy, but will take 3months to get to Australia via standard postage.